My father built an alternate version of this design which orients the differentials differently. It's more efficient then my design because it doesn't have any of the 8 tooth gears. In normal forward motion there is a direct drive from the rear motor to the two wheels.
My father's design:
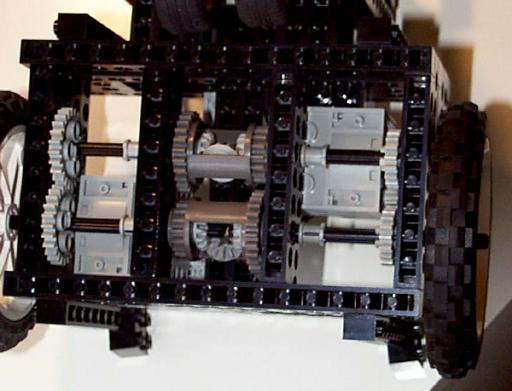
In this picture each motor is has a 16t gear driving the 16t side of the differential. On the side of the robot with two 16t gears with a 24t gear connecting them. This gear is held in place using one of the 1x1 pieces with a hole drilled in it, and is 1 2/3rds of a unit higher then the beam holding the 16t gears.
alex@phred.org michael@phred.org