
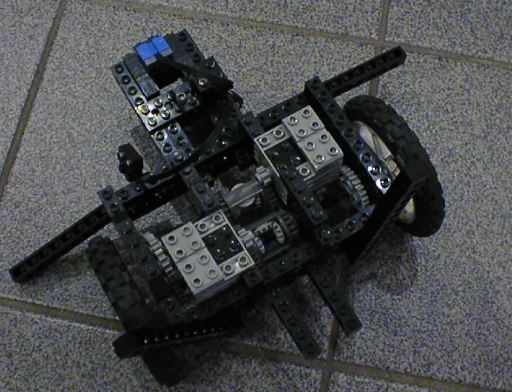
Assembled robot
This robot uses an adder/subtractor transmission and bumpers which surround most of the body to be wander around rooms aimlessly. It can go for about 15 minutes in my living room without getting stuck (when it does get stuck its usually under the futon). Now I just need to add some smarts (currently it makes random turns away from objects when it runs into something).
A picture of the assembled robot. The two front bumpers detect hits in the front and if it runs into anything while turning. The rear bumpers detect hits while backing up. They are linked to the front ones to minimize the number of touch sensors required.
Assembled robot
A closeup of the bumpers. The touch switches are normally pressed and become released when the bumper hits something. The arms are similar in design to the Lego "torbot".

Bumpers
The transmission of the robot with the motors attached. The motor in the front is used for turning and the motor in the rear is used for driving.
Transmission with motors
A picture of the transmission without the motors attached. In this picture you can see the 24t idler gear placed between the two 16t gears. The 24t gear is held in place using a 1x1 brick with a axle hole in it. It is 1 2/3 studs higher then the 16t gears.
![]()
Top view of the transmission
A picture of the transmission from the bottom. This is the clearest picture of the layout for the adder/subtractor.
![]()
Bottom view of the transmission
Sorry about the poor quality of the photographs. These were taken at night and the lighting was poor at best. I will try and reproduce them with better lighting when the sun is out.